B3DO: Berkeley 3-D Object Dataset
A quality depth sensor, the Microsoft Kinect, is now in millions of homes. Yet robust household object detection is still not a reality. To get there, we are collecting a massive, crowd-sourced, and challenging 3-D object dataset.
Download the dataset
The dataset is available as a zip archive here.
Results that refer to this version are available in the following publication:
A. Janoch, S. Karayev, Y. Jia, J.T. Barron, M. Fritz, K. Saenko, T. Darrell. A Category-Level 3-D Object Dataset: Putting the Kinect to Work. ICCV Workshop on Consumer Depth Cameras in Computer Vision 2011.
Details
For the first few decades of the field's existence, computer vision has been focused on algorithmic, logical approaches to perception. But it was only with the arrival of the era of large datasets, collected and annotated using the Internet, that truly significant progress has been made in object recognition.
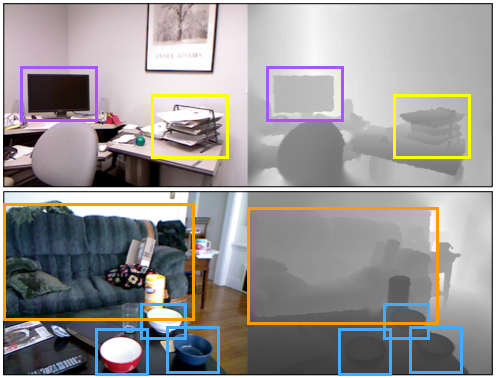
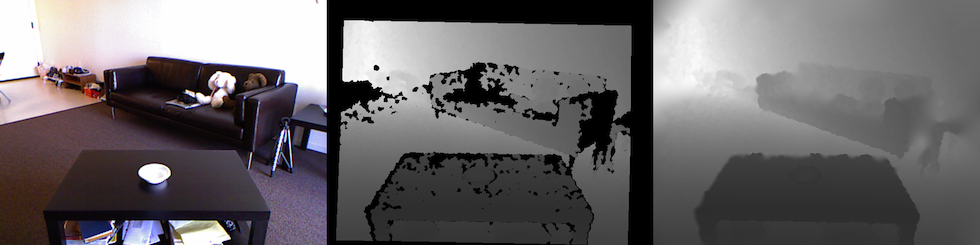
With the recent proliferation of the Microsoft Kinect, we can for the very first time collect an "Internet-sized" dataset of matched color and depth images. We are making this dataset public to hasten progress in the field of robust, cheap, household object recognition.
Update September 2014: Annotations of the 3D center points of all objects in the dataset were recently made available by Ehud Barnea.
Thank you for your interest.
Made by Sergey Karayev & Allison Janoch.